Using a four motor quadcopter design we are able to change directions elevation and tilt by simply manipulating how much voltage goes into the motors while it is in the air. Quadcopter frame design calculations pdf calculations purchasing individual parts testing those parts designing the final product In this we initially decided how big we.

Pdf Design And Development Of Heavy Lift Hexacopter For Heavy Payload
Dynamics of Quadcopter We will begin to discover the power of the quadcopter by introducing two frames that will work on it.
. So Payload Capacity A B D C. A quadrotor helicopter quadcopter is a helicopter which has four equally spaced ro-tors usually arranged at the corners of a square body. Hence the arms behave as cantilever beam.
Quadcopter design calculations pdf T. The motors and their propellers are mounted to the frame and the only way to induce a lateral motion is to tilt the entire frame. The last part of the paper attempts to compare the Vee Model system engineering approach with.
In this project you will design and test a control system written in MATLAB that will fly a quadcopter. It consists of microcontrollers which control the overall performance of quadcopter such as flying mechanism and live streaming of videos. HW SW selection system architecture Dealing with physical systems.
Keep in mind that for an agile aircraft you generally you want it to hover at 50 throttle or lower. After reading of this Instructable it should be possible not only to create your own quadcopter. Centralized distributed make buy The gory details.
The complicated design of the rotor and swashplate mechanism presents some problems increasing construction costs and design complexity. These use variation of RPM to control lift and torque. More thrust is produced on one side of the rotor plane than the other.
The body structure is defined by the shape of a quadcopter with rotor axes pointing in the right z-. Unlike a conventional helicopter the quadcopter does not have a tail rotor to control the yaw motion. Search for jobs related to Quadcopter design calculations pdf or hire on the worlds largest freelancing marketplace with 20m jobs.
After the microcontroller ESC is used to control the propeller speed depending on the signal from the computer. Quadrotor Quadcopter is a four-propeller helicopter usually arranged in a square with four independent rotors reducing the need for a swashplate. Its free to sign up and bid on jobs.
IF A Motor Thrust B Num of Motors C the weight of the craft itself D Hover Throttle. We can also integrate an array of sensors onto our quadcopter that can measure the temperature and guide it away from obstacles. The thrust due to motor act at the tips of the arms and the weight of the quadcopter acts at the center of the frame.
Control of vehicle motion is achieved by altering the IJSER. And even of this model I have made all calculations in advance. Implement the quadcopter flight mechanics nonlinear model in MATLABSimulink.
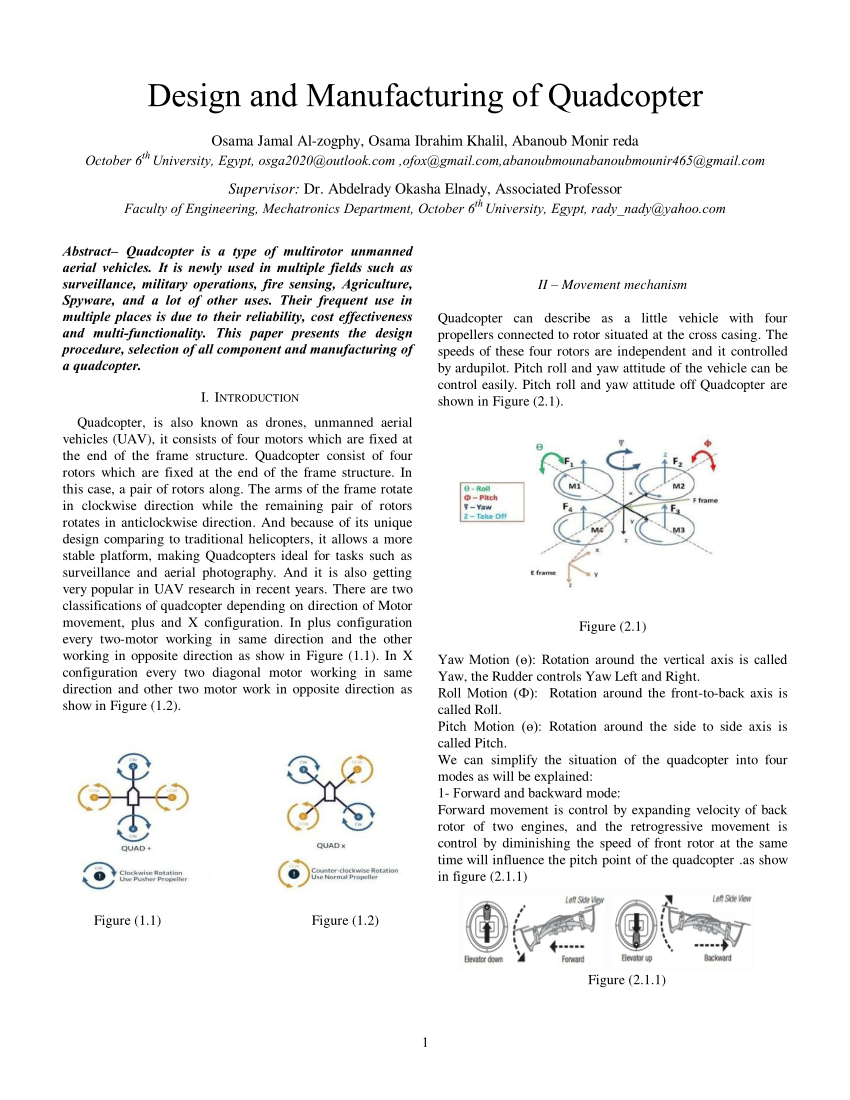
Quadcopter Drone A quadcopter is a simple flying mechanism also known as a quadrotor that has four arms which each one of them has a motor that is attached to a propeller. Design implement and validate a set of basic and advanced control laws for automatic guidance. Download full-text PDF Read full-text References 8 Figures 2 Abstract and Figures Quadcopter is a type of multirotor unmanned aerial vehicles.
Design of a Quadcopter is an important aspect for its aerodynamics of which modeling and analysis are two key areas involved in its manufacturing. A 3D-printed quadcopter with its stable flight control are provided as an illustration of the student efforts5 Major blocks of the system include. 1 the quadcopter frame 2 the control system and 3 the power and thrust system.
Quadcopter weight calculator formula. 43 Propellers On each of the brushless motors there is mounted a propeller. The non-inserted frame is defined by the ground with gravity pointing in the wrong z-direction.
The typical quadcopter design has as stated earlier no moving parts except for the propellers. Initially assuming to be as 8-9 N Figure 1 Cantilever Beam The bending stress due to the thrust generated by motor should be less than the design stress. Quadcopter Attitude Control Mx Motor direction Tx Thrust force direction f front l left r right b back 7 Quadcopter Attitude Control Vary rotation speed of each motor Front Rotor Mf and Back Rotor Mb pair rotates in a clockwise direction Right Rotor Mr and Left Rotor Ml pair rotates in a counter-clockwise direction.
A swashplate method was needed to allow the helicopter to use more degrees of freedom but the same level of control could be achieved by adding multiple rotors. Design implement and validate a set of basic and advanced control laws for stabilization and guidance. Than two rotorspropellers that lift and control the platform its design combines the contradictory requirements of limited.
As a conclusion the size of the quadcopter is doubled. A Quadcopter is a quadrotor helicopter which is having the four motors but it is entirely different where as the lift force is produced by the four motors. The RPMs can be calculated in this way.
Two clockwise CW and two counter-clockwise CCW. RPMKv V We are using 1240 Kv with max power of 150 watts. The end result is an unusual self-build quadcopter.
Motors in real life inertia max battery power Ideas for future expansion. With reusing of most parts from the first quadcopter. The quadcopter design is based on the embedded system platform.
Abstractwe have conceived a novel compound multicopter helicopter type utilizing multiple different size propellers for separate lift and attitude control configuration specifically for flight through narrow corridors. It is newly used in multiple fields such as. Laurent Quebec 514 343-9010 Guide to Design Criteria for Bolted and Riveted Joints pdf Quadcopter with EN4 Dynamics and Vibrations.
Thrush of about 250 gm from each motors would be su cient for hovering. Helicopters quadcopters use two sets of identical fixed pitched propellers. 2You can start by looking up the thrust data for your motors if.
These motors can provide a thrust of 400 gm at 10 Amps and upto a maximam of 700 gm at 16 Amps. The similarity exist between the helicopter and the quadcopter is the vertical takeoff and landing.
Pdf Design And Manufacturing Of Quadcopter

Pdf Design Modelling And Control Of A Single Rotor Uav

Pdf Design Modelling And Control Of A Single Rotor Uav
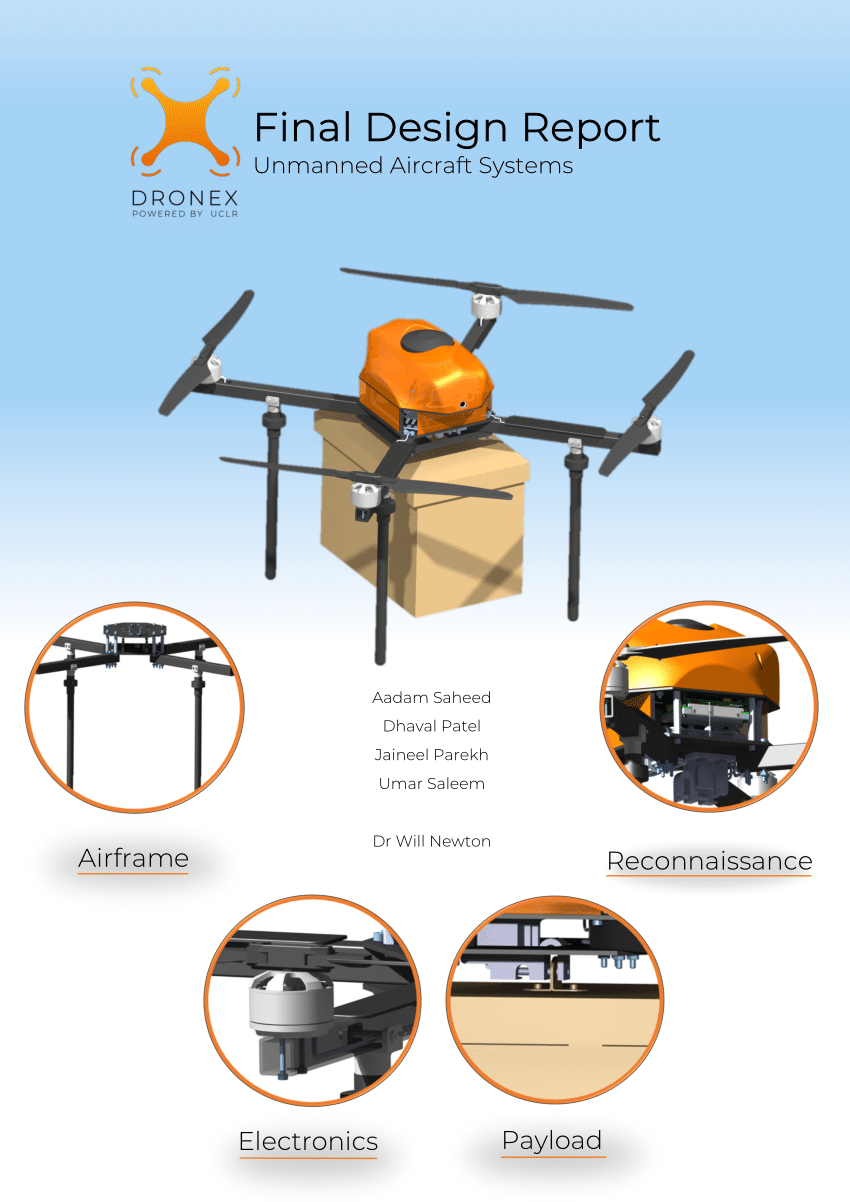
Pdf Dronex Uav Design For Imeche Uas Competition

Pdf Design And Manufacturing Of Quadcopter

Pdf Quadrotor Modeling And A Pid Control Approach

Pdf Design And Manufacturing Of Quadcopter
2
0 comments
Post a Comment